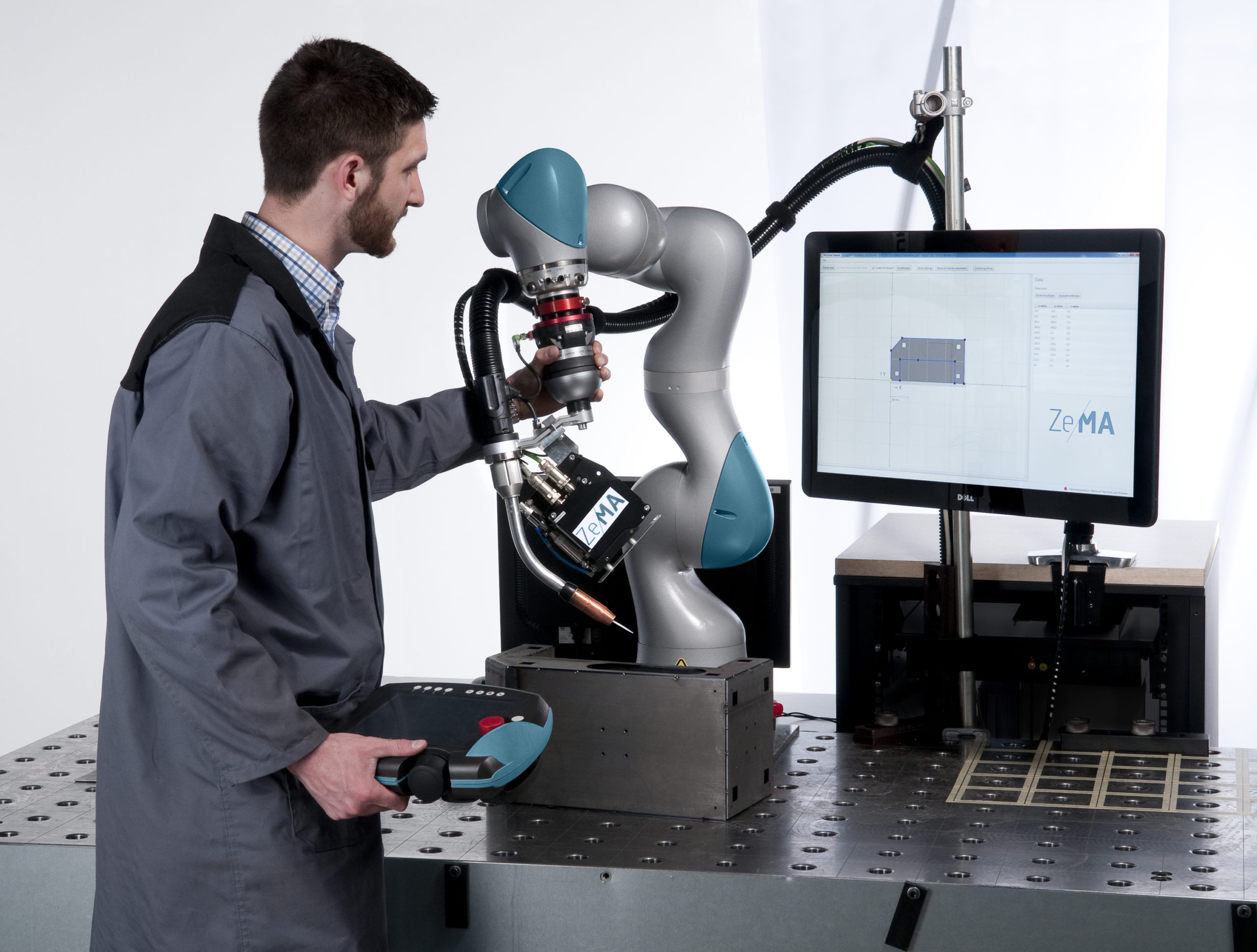
In the current EU research project 4by3, various scenarios for human-robot cooperation are currently being implemented. ZeMA's work packages include, on the one hand, the development of a human-robot-capable system and, on the other hand, the implementation of two application scenarios.
problem
objective
• Modularity
• Safety
• Usability
• Efficiency
approach
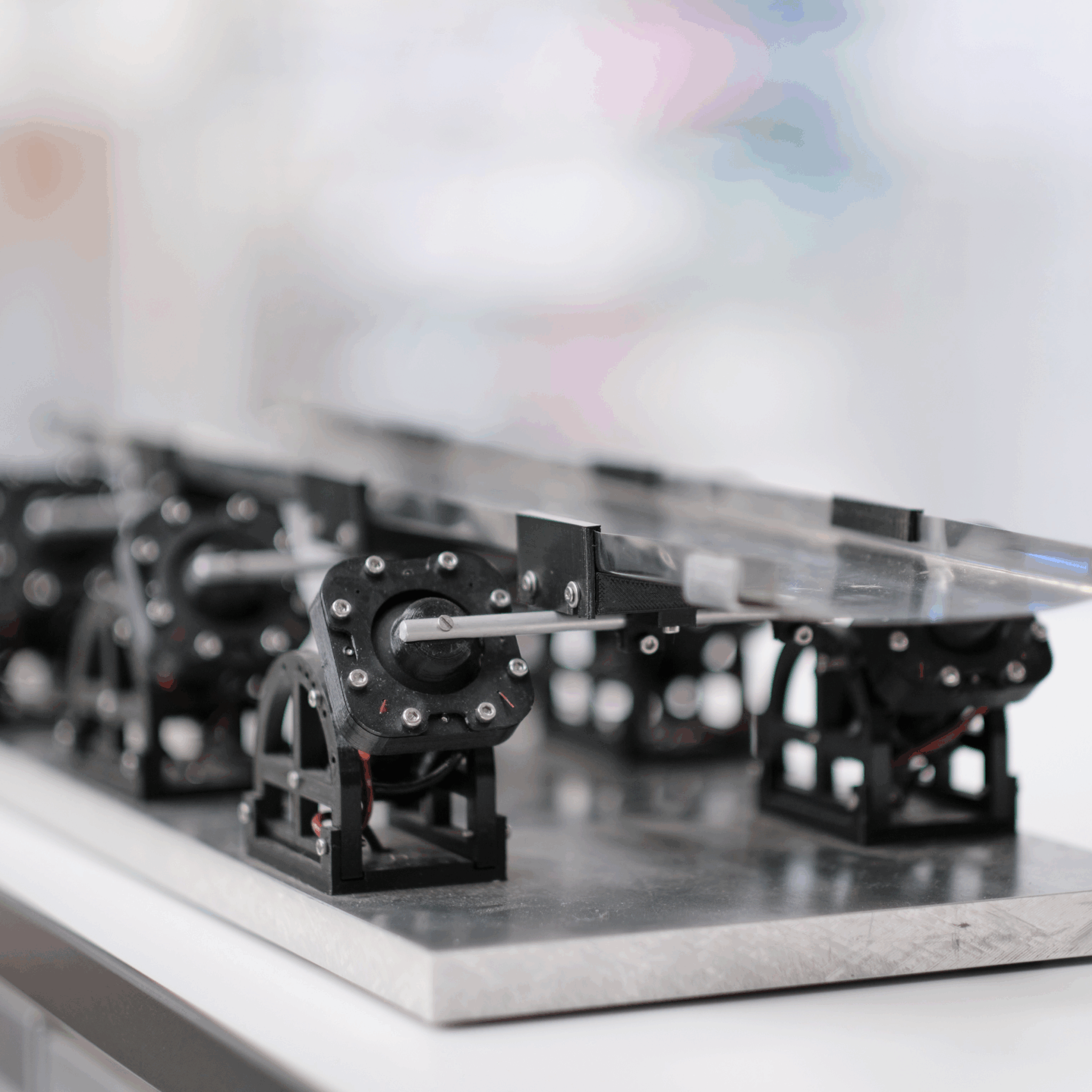
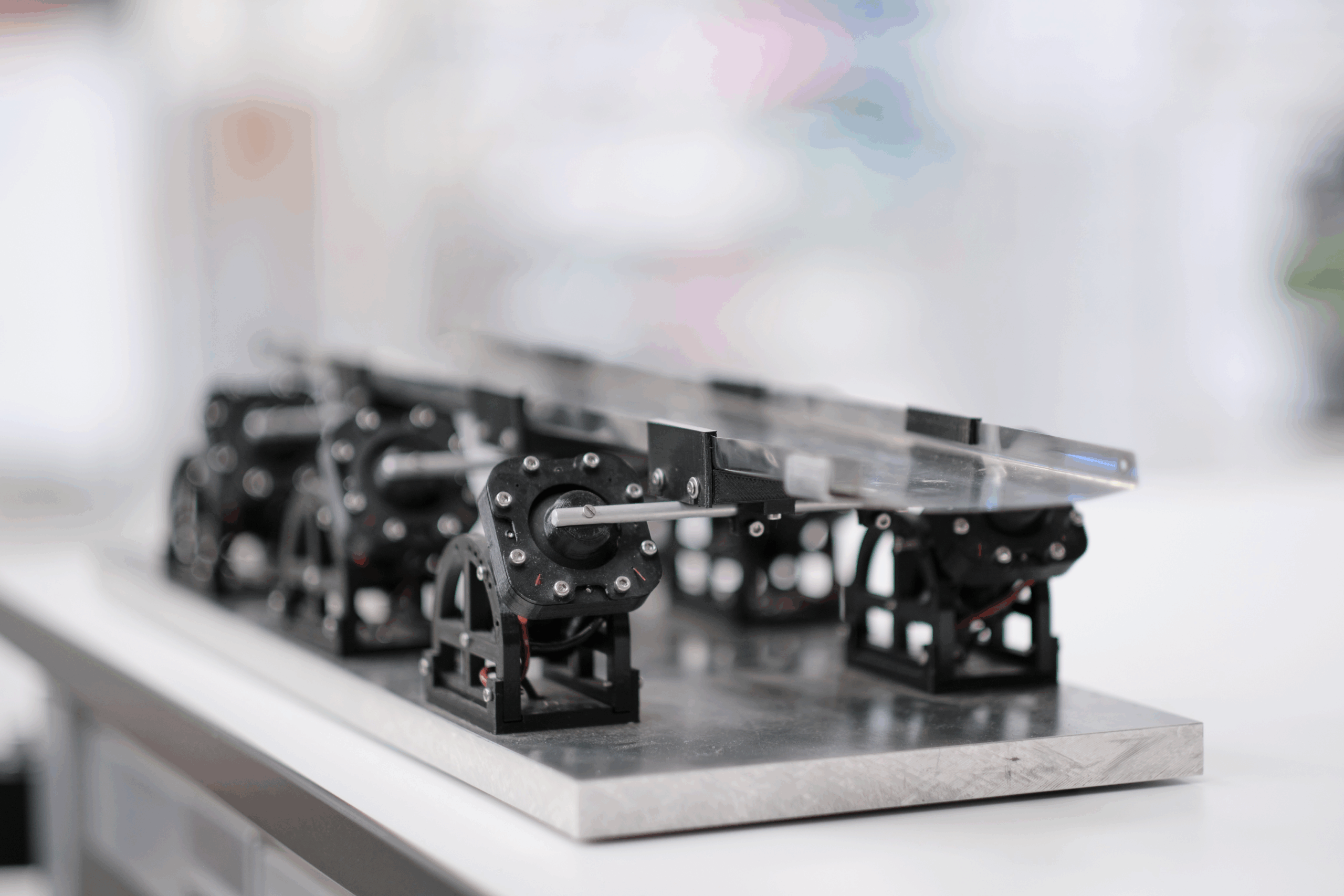
The design-systematic development of the modular, flexible and collaborative 4by3 robot consists of several work packages. In addition to actuator, control and safety development, ZeMA is also involved in the development of arm modules and their connecting elements. By means of a kinematic structural analysis, the required working spaces of the robot are examined and converted into a kinematic robot construction kit. The basis for the optimization of the modular system is the validation and realization of the 4by3 robot in the production environment.
Results / Project status
Due to the modularity of the new generation of robots, the hardware and software of the systems can be combined as desired by the user. In this way, the robots can be optimally adapted to the respective task. New mechanisms and strategies can ensure the greatest possible safety for the worker during operation at the common workplace. Multimodal interaction mechanisms enable particularly simple programming. This significantly increases user-friendliness, especially for workers without prior programming experience.
Through these measures, efficient robots are developed that can be put into operation quickly and work reliably and safely.
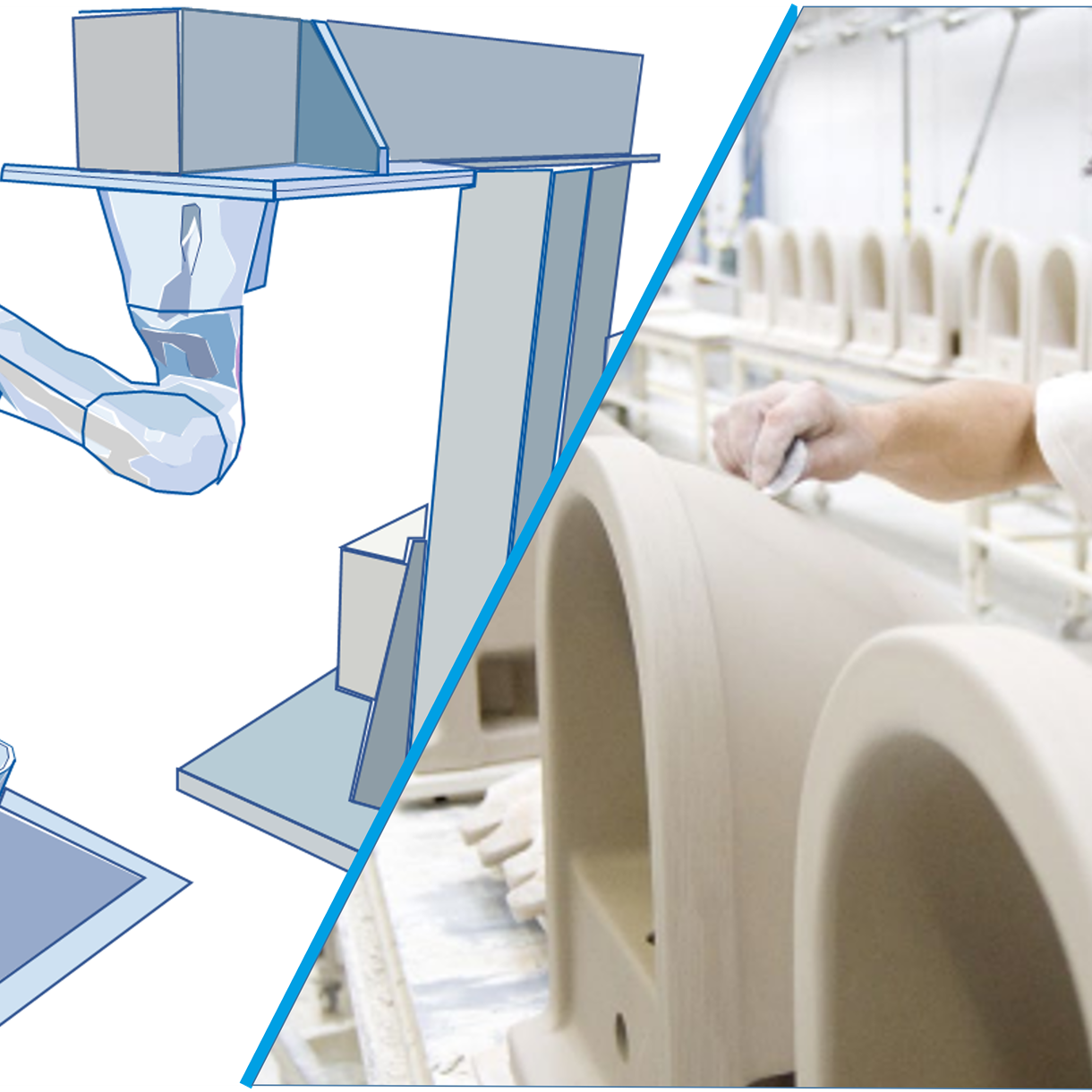
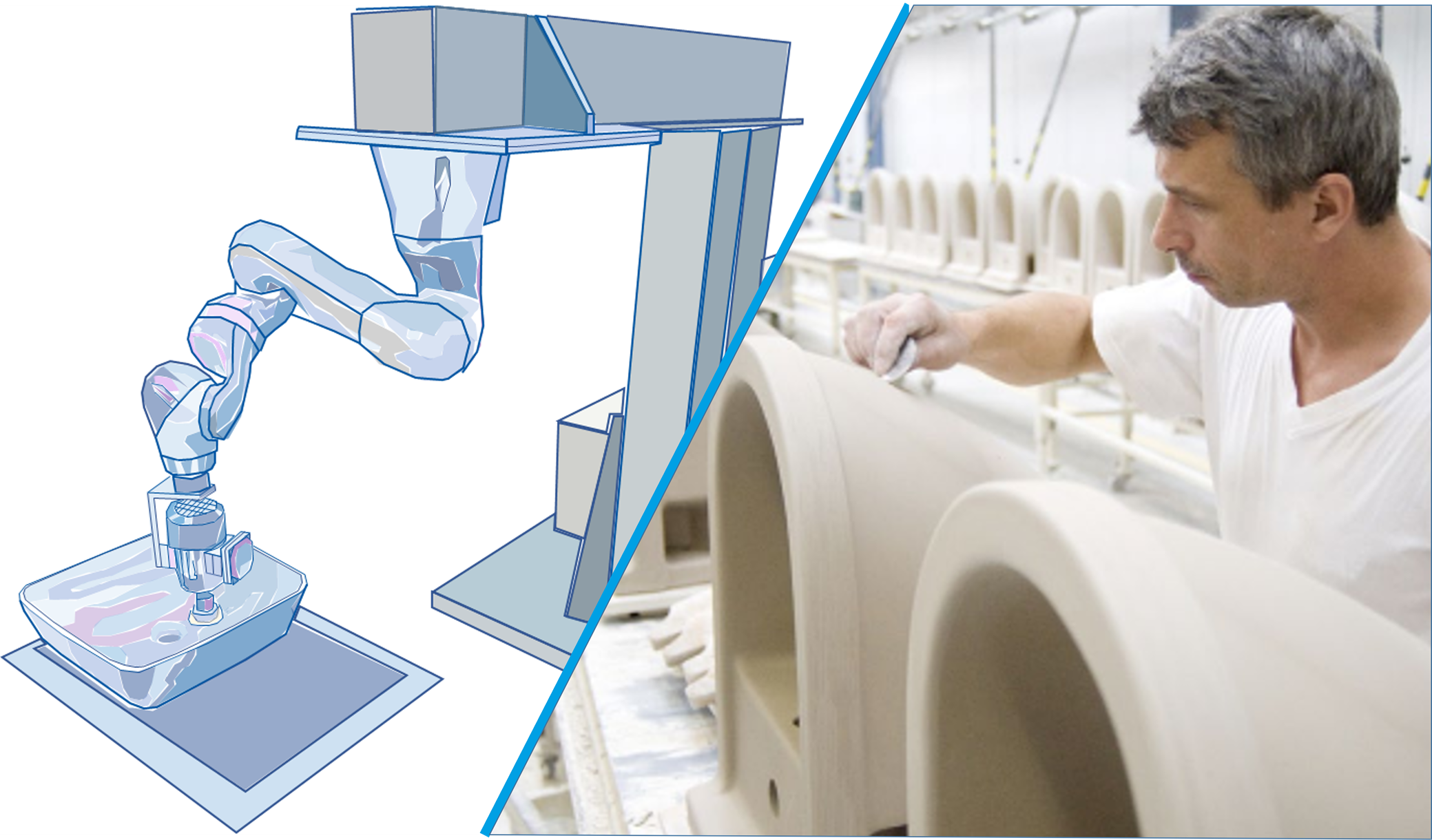
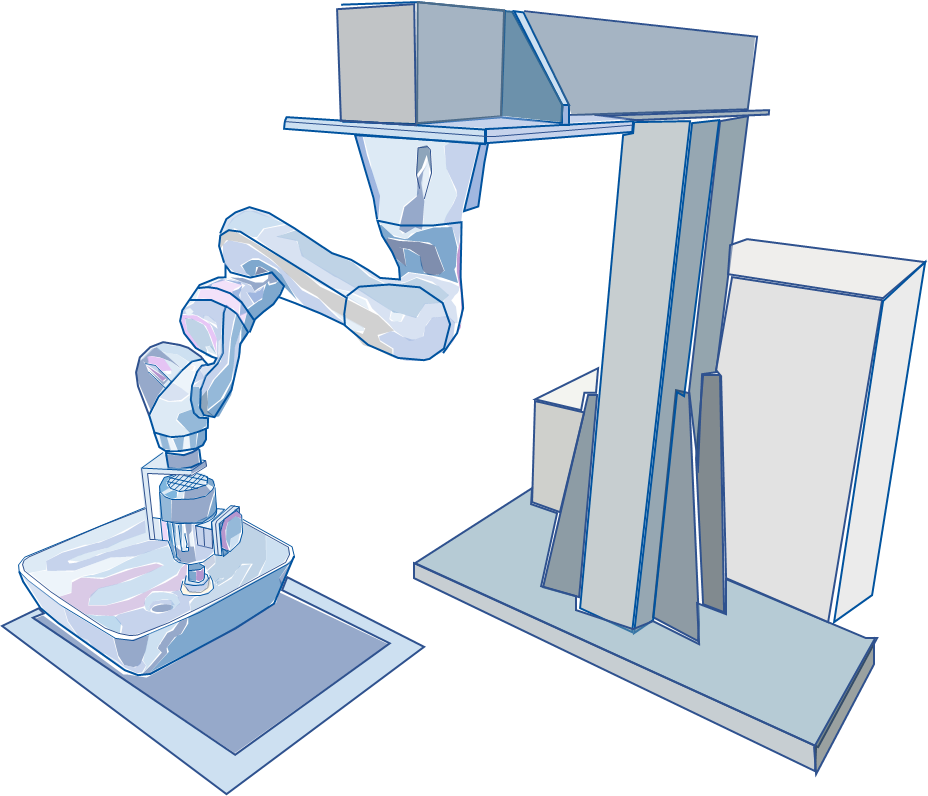
Four pilot applications are used to develop and adapt the robots according to production needs.
Recovery concept:
Duration:
01.12.2014 - 31.12.2017
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}