ZTS Project SenRob
problem
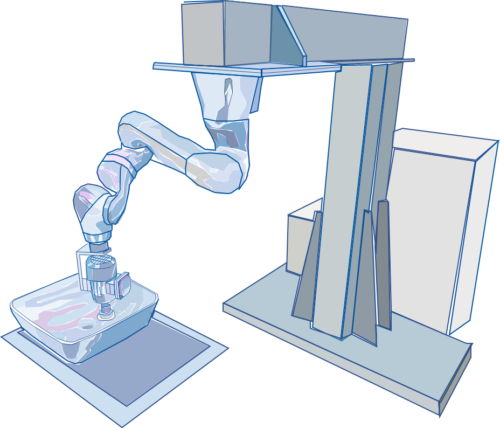
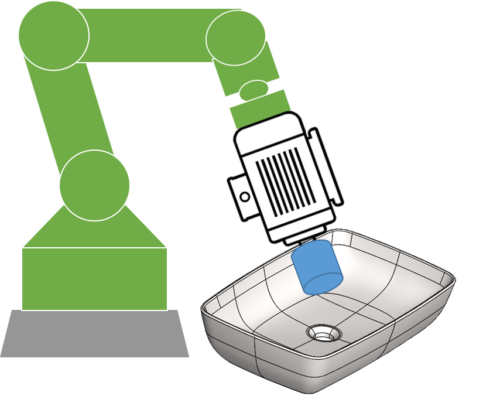
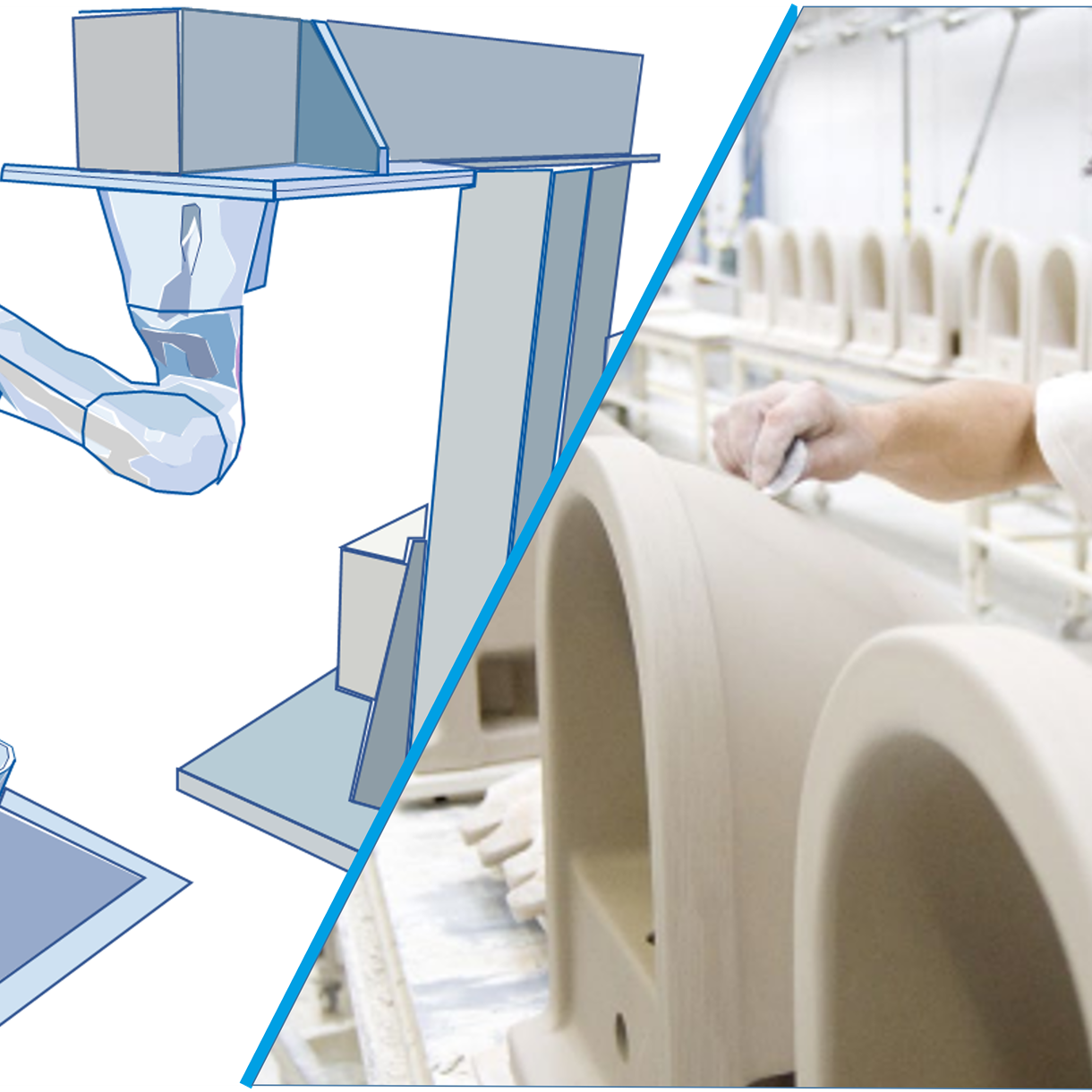
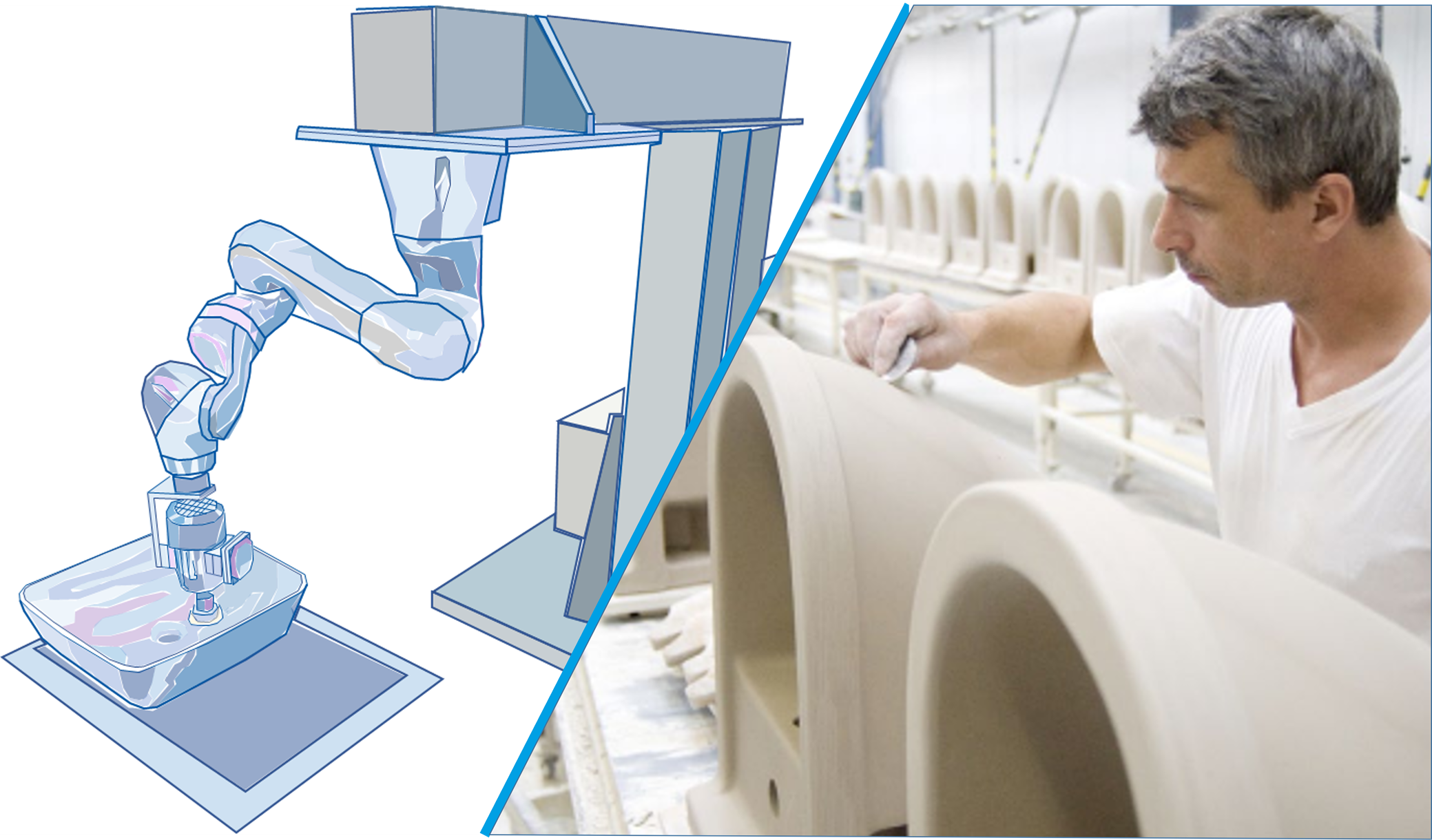
The manufacturing process of ceramic components results in production-related material supernatants as well as defects that have to be removed in the downstream white plastering process. Grinding requires a direct interaction of the tool with the workpiece surface to be machined, so that contact forces and moments are created. When automating such a process with the help of a robot, a compliant behavior of the robot manipulator is necessary. In particular, the chosen control strategy plays an important role in order to be able to react adequately to the component contour during the machining process. In addition, a special tool and selected sensors in combination with suitable software are necessary for a holistic execution of the grinding task.
objective
The aim of this project is the basic research and development of a prototype for automation, the so-called white plastering process, with a sensitive robot. The robot application should carry out the detection of defects on the whiteling as well as the processing and quality control of the whiteling. For this purpose, the systematic and random errors are detected by a measuring technique and the robot grinds the faulty free-form surface of the whiteling with a precisely defined force. The research project lays the foundations for robot-based application. These include hardware and software components. Based on a process and technology development, the process and the necessary resources such as robots, sensors and tools as well as the robot path planning and control are to be researched and implemented prototypically.
approach
The research project is divided into three work packages:
AP1: In step 1, an analysis of the current production process and the product is carried out.
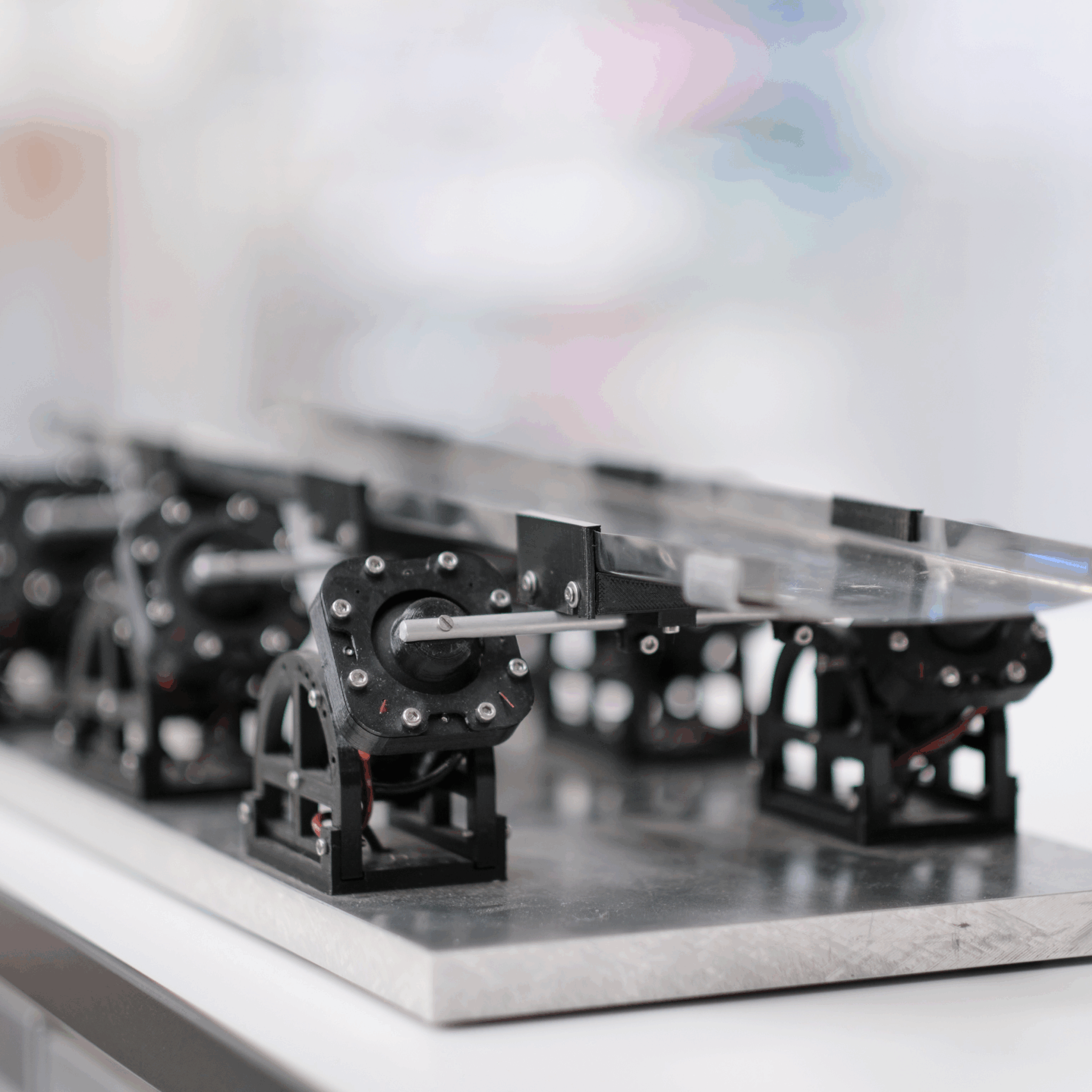
AP2: Step 2 involves process development. These include in detail the robot concept, the tool, the multi-sensor system and the development of the software components.
AP3: The aim of step 3 is to carry out test series in the real working environment. Insights and information about the current concept are collected and process robustness and technical risks are identified.
AP1: In step 1, an analysis of the current production process and the product is carried out.
AP2: Step 2 involves process development. These include in detail the robot concept, the tool, the multi-sensor system and the development of the software components.
AP3: The aim of step 3 is to carry out test series in the real working environment. Insights and information about the current concept are collected and process robustness and technical risks are identified.
Results / Project status
The project started in May 2021 and runs until August 2022. By developing a prototype tool, it has already been possible to identify findings for the adjustment of grinding and robot parameters. In addition, an approach for the automatic sensor-based assessment of component edges in the context of quality control was developed. In the following, it is necessary to test what has already been developed in the context of test series with the help of a demonstrator in the real environment.
The project is funded under ERDF by the "ZTS Zentrale Technologieprogramm Saar"
Category: Assembly systems










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}