ZTS Project SenRob 2.0
problem
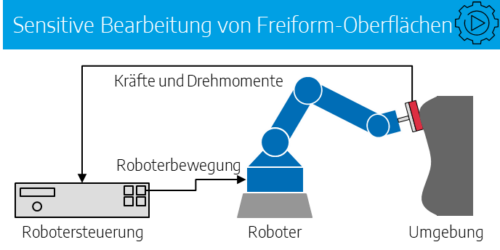
The manufacturing process of ceramic components results in production-related material supernatants as well as defects that have to be removed in the downstream white plastering process. The machining of the surface is a decisive step in the manufacturing process, which significantly influences the quality of the product and requires a direct interaction of the tool with the workpiece surface to be machined. Due to the complexity of the free-form surfaces and the need for sensitive and sensitive processing, this process is carried out by humans. Modern robot systems offer the general flexibility to automate surface machining tasks with complicated geometries by determining and regulating contact forces and moments through a flexible behavior of the robot manipulator in order to be able to react adequately to the component contour during the machining process. In addition, a special tool and selected sensors in combination with suitable software are necessary for a holistic execution of the machining task.
objective
The main objectives of this project are to develop an automated, robotized and intelligent white plastering process including robot-based milling of functional holes and to combine it with automated quality control and data acquisition. A sensitive robot system is to perform the recording of errors and process data at the blank as well as the processing and quality control in this process step. The robot system is able to map the sensitivity and sensitivity of the manual process and also contributes to quality assurance in combination with sensor technology. In addition, the robot system should be able to react adaptively and intelligently to individual component defects (and characteristics) in order to be able to compensate for component variance.
approach
In order to achieve the project objectives, the project partners work together on an interdisciplinary basis in order to research suitable key technologies and to transfer them into a test set-up in a production-related environment as well as into the industrial application environment. The research project is divided into five work packages:
AP1 Process Planning and Design: Conception and development of a sensitive robot system for processing ceramic free-form surfaces, taking into account the process properties and orchestration of the individual components.
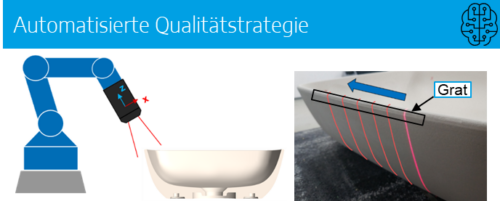
AP2 Quality Strategy: Conception and development of an automated quality control for the acquisition and evaluation of quality characteristics by means of selected sensors and the application of algorithms from the field of artificial intelligence.
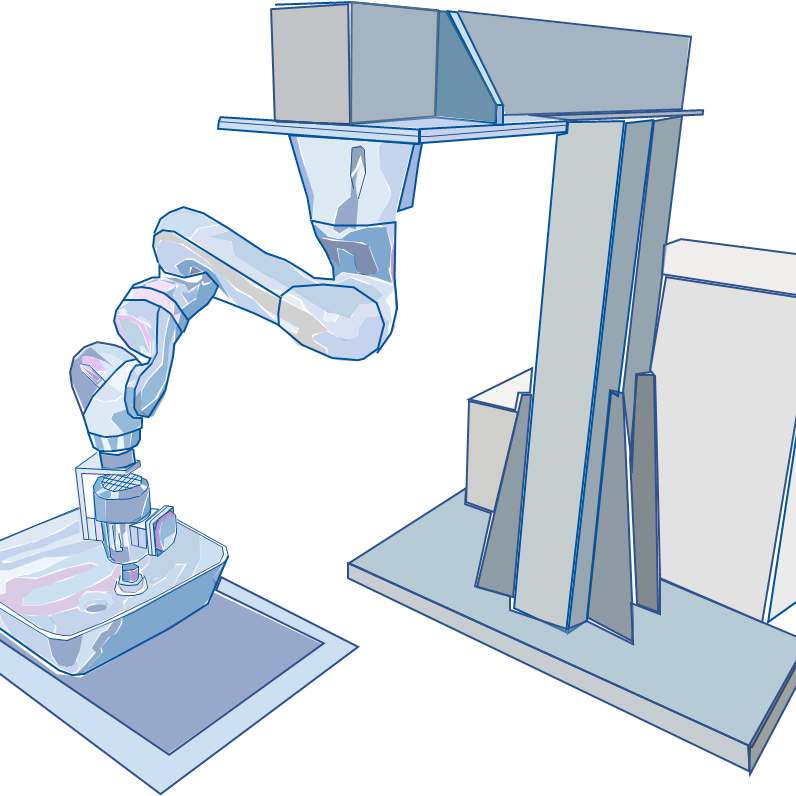
AP3 Robotic Milling: Development of a robotized milling machine for the generation of functional holes such as overflows or tap holes, taking into account the process requirements with prototypical implementation.
AP4 Digitization/ smart factory: Development of a strategy for the collection, processing and utilization of process data with the aim of drawing conclusions about the grinding and milling process as well as upstream and downstream processes.
AP5 Data usage for intelligent processing: Development of a machining process that changes its process parameters (force, speed, acceleration, etc.) and its path autonomously with the help of component-specific information (e.g. burr shape, burr localization, etc.) in order to be able to react independently and autonomously to the process without external intervention.
AP1 Process Planning and Design: Conception and development of a sensitive robot system for processing ceramic free-form surfaces, taking into account the process properties and orchestration of the individual components.
AP2 Quality Strategy: Conception and development of an automated quality control for the acquisition and evaluation of quality characteristics by means of selected sensors and the application of algorithms from the field of artificial intelligence.
AP3 Robotic Milling: Development of a robotized milling machine for the generation of functional holes such as overflows or tap holes, taking into account the process requirements with prototypical implementation.
AP4 Digitization/ smart factory: Development of a strategy for the collection, processing and utilization of process data with the aim of drawing conclusions about the grinding and milling process as well as upstream and downstream processes.
AP5 Data usage for intelligent processing: Development of a machining process that changes its process parameters (force, speed, acceleration, etc.) and its path autonomously with the help of component-specific information (e.g. burr shape, burr localization, etc.) in order to be able to react independently and autonomously to the process without external intervention.
Results / Project status
The project started in January 2024 and runs until December 2026. The work is currently being carried out in the first work packages of the project. At the end of the project, a demonstrator in the research environment as well as an installation will be integrated into the industrial environment to validate the research results.
Recovery concept
In view of the scientific and technical prospects of success, the cooperation project aims to transfer the results to industry. Due to the flexibility and adaptability of the developed sensitive robot system, the manual machining process in the industrial environment can be automated. In addition, the transferability of the results to other sensitive assembly and production operations is ensured. In addition, the demonstrator and the research results are used to apply for and carry out further research projects. After the funding period, the results will be integrated into an Open Lab Factory, where these suppliers and users as well as other interested parties can be introduced.
The project is funded under ERDF by the "ZTS Zentrale Technologieprogramm Saar"


Category: Assembly systems










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}