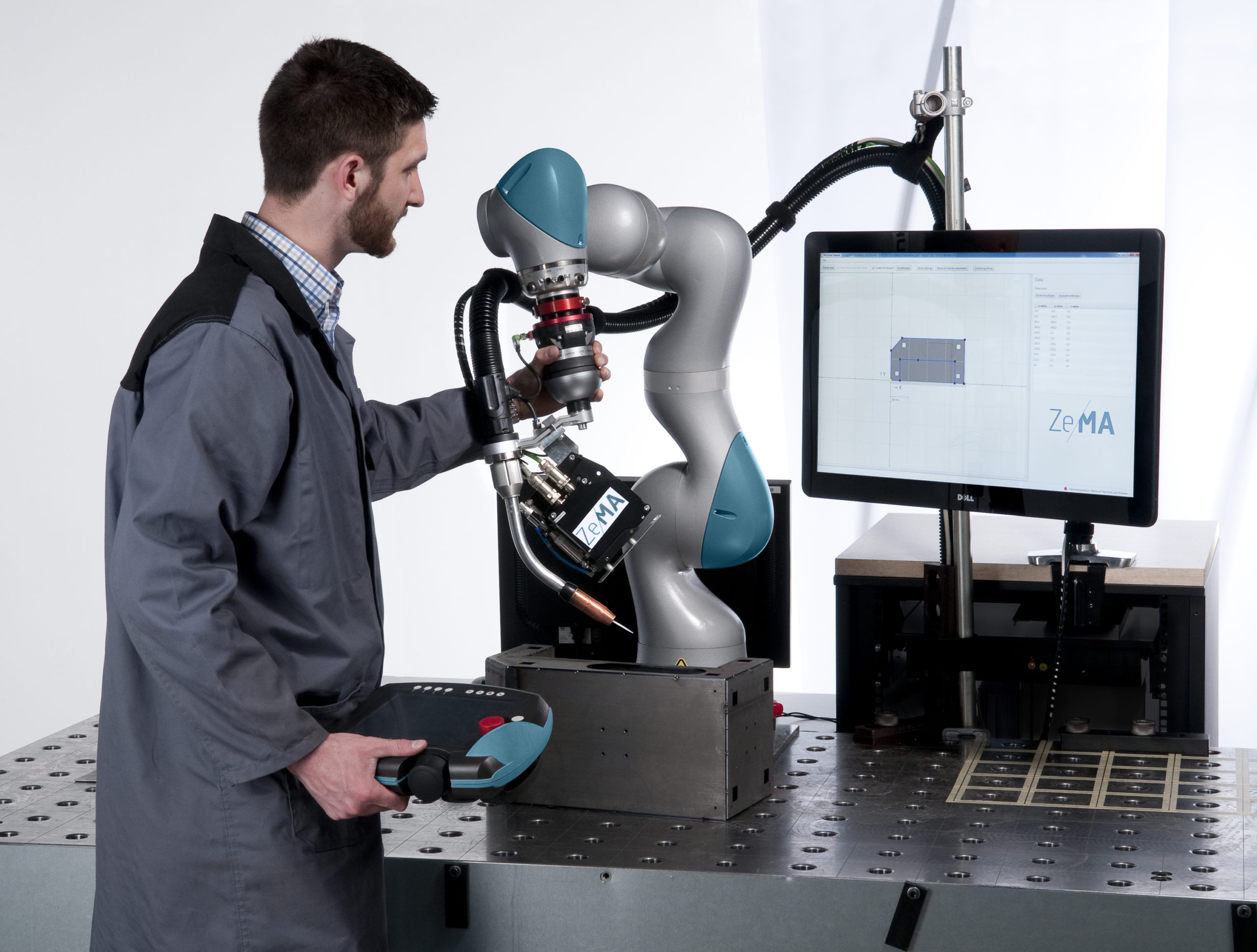
Le projet de recherche 4by3 de l'UE met actuellement en œuvre différents scénarios de coopération homme-robot. Les modules de travail de ZeMA sont, d'une part, le développement d'un système compatible homme-robot et, d'autre part, la mise en œuvre de deux scénarios d'application.
problématique
Objectif
• Modularité
• Sécurité
• Facilité d'utilisation
• Efficacité
Procédure à suivre
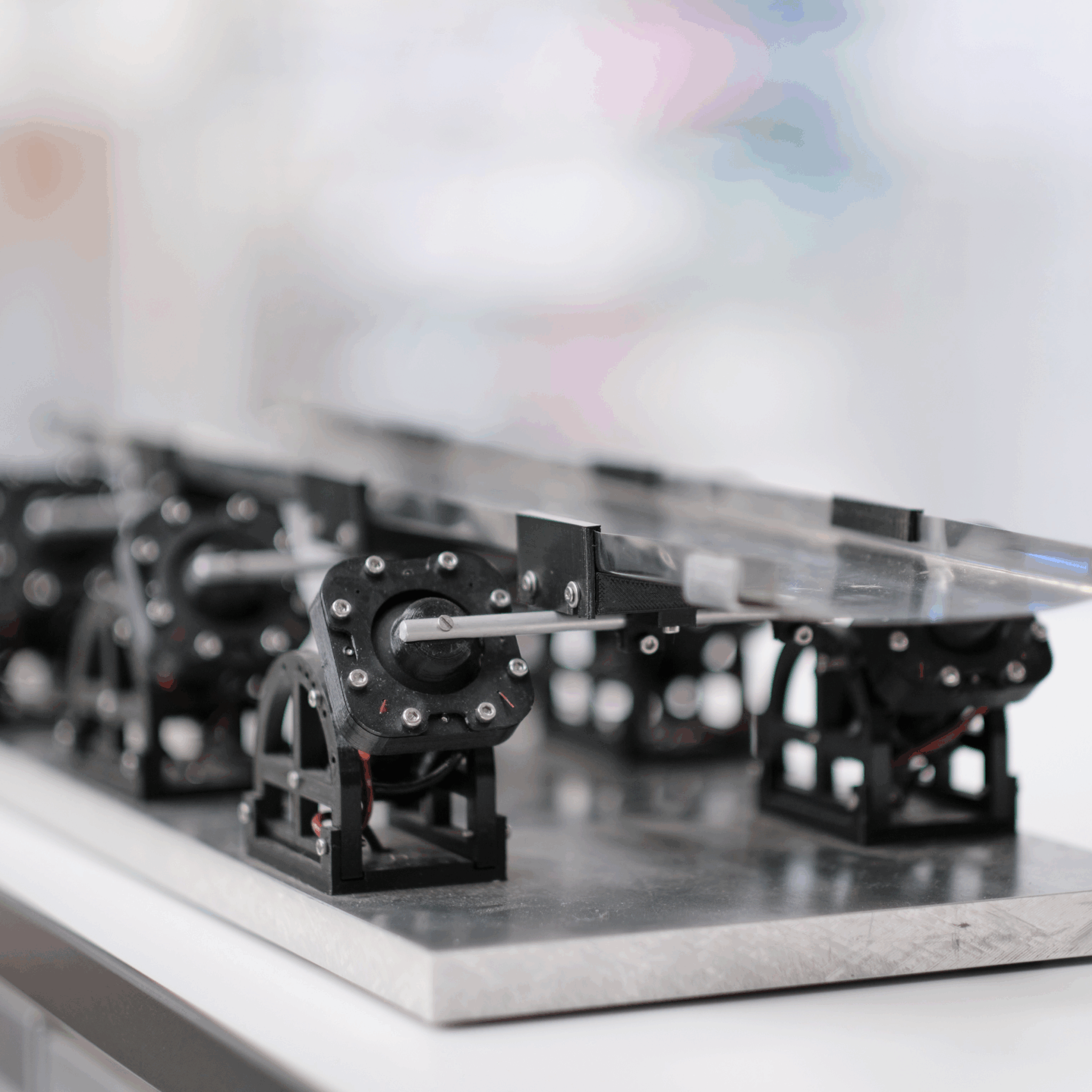
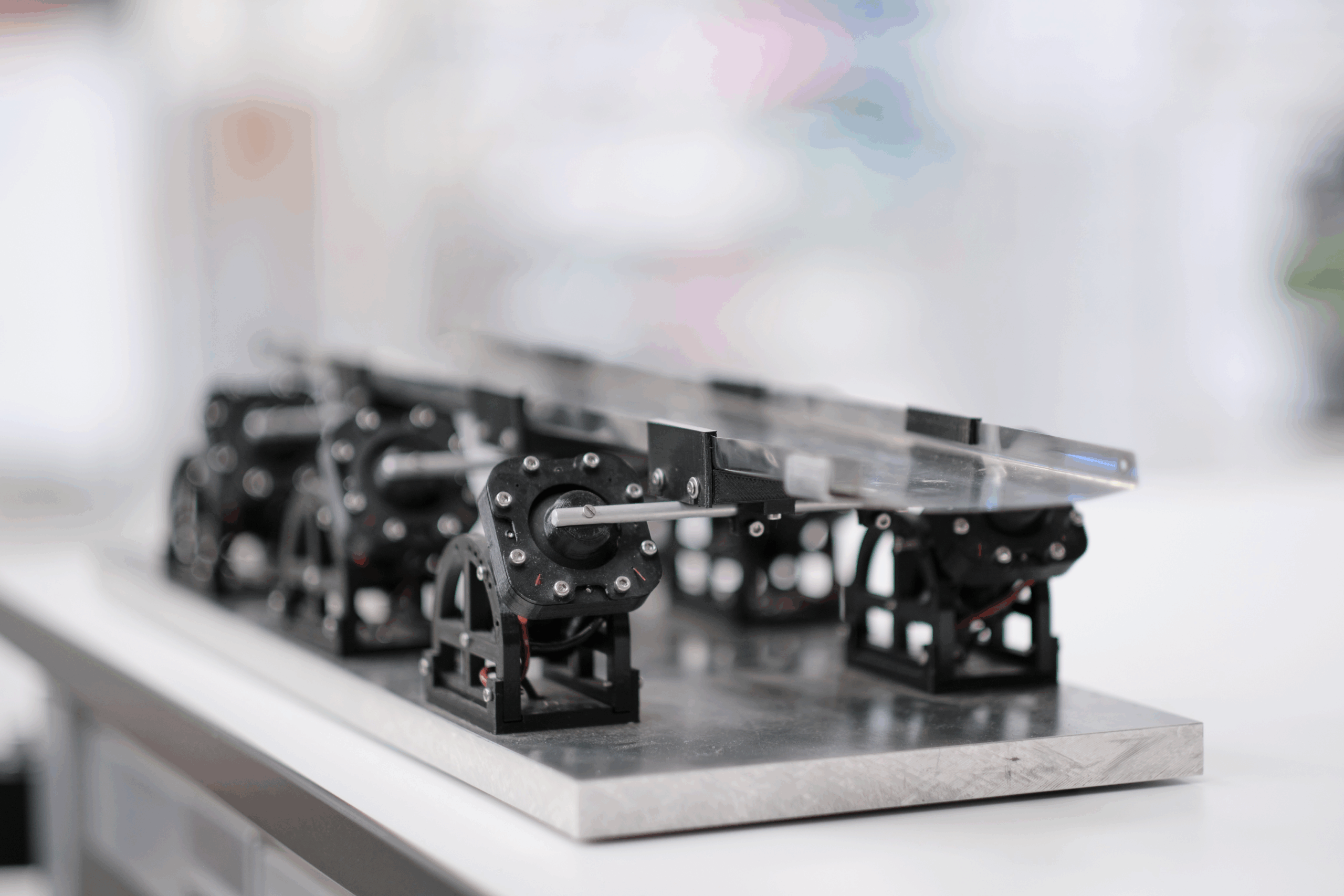
Le développement modulaire, flexible et collaboratif du robot 4by3 se compose de plusieurs modules de travail. En plus du développement des actionneurs, du contrôle et de la sécurité, le ZeMA s'occupe du développement des modules de bras et de leurs éléments de connexion. Grâce à une analyse de structure cinématique, les espaces de travail nécessaires du robot sont examinés et transférés dans un système de construction robotique cinématique. La base de l'optimisation du système modulaire est la validation et la réalisation du robot 4by3 dans l'environnement de production.
Résultats/état d'avancement du projet
Grâce à la modularité de la nouvelle génération de robots, le matériel et le logiciel des systèmes peuvent être combinés à volonté par l'utilisateur. Ainsi, les robots peuvent être adaptés de manière optimale à chaque tâche. De nouveaux mécanismes et stratégies peuvent garantir la plus grande sécurité possible pour le travailleur lors de l'exploitation sur le lieu de travail commun. Les mécanismes d'interaction multimodale permettent une programmation particulièrement simple. Cela augmente considérablement la facilité d'utilisation, en particulier pour les travailleurs sans connaissances préalables en programmation.
Grâce à ces mesures, des robots efficaces sont développés, qui peuvent être mis en service rapidement et fonctionnent de manière fiable et sûre.
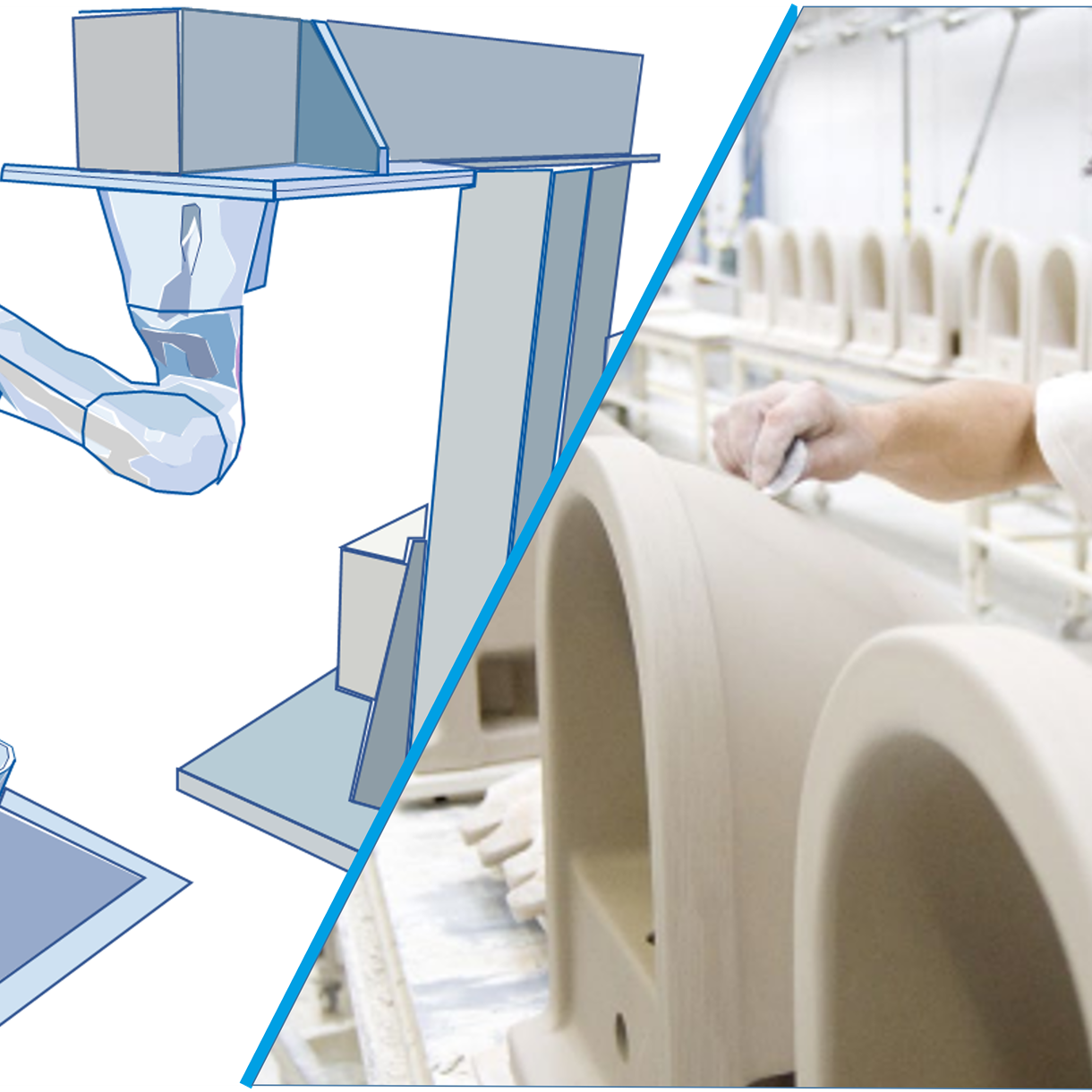
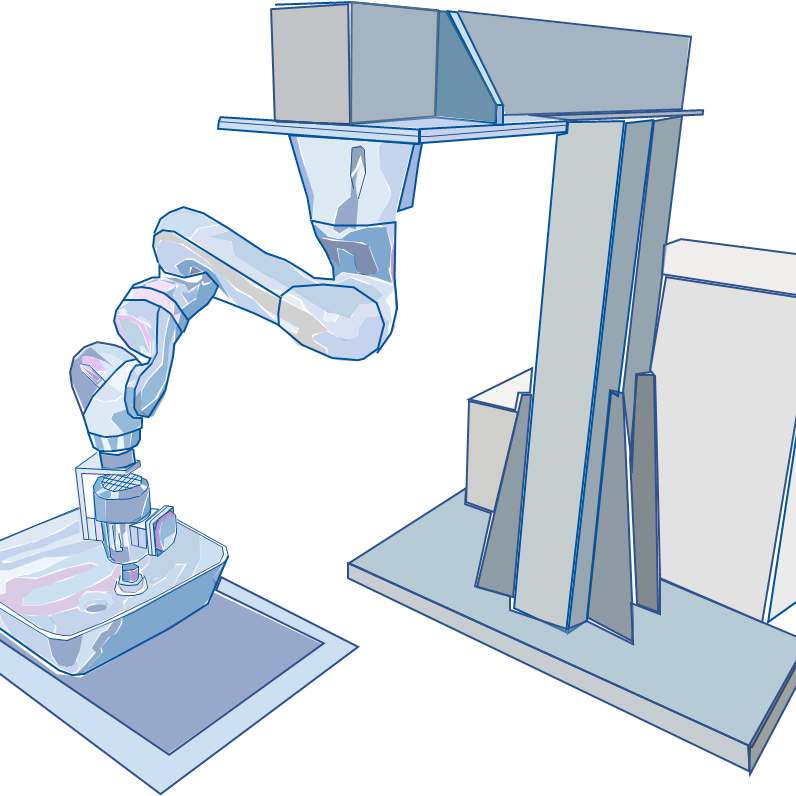
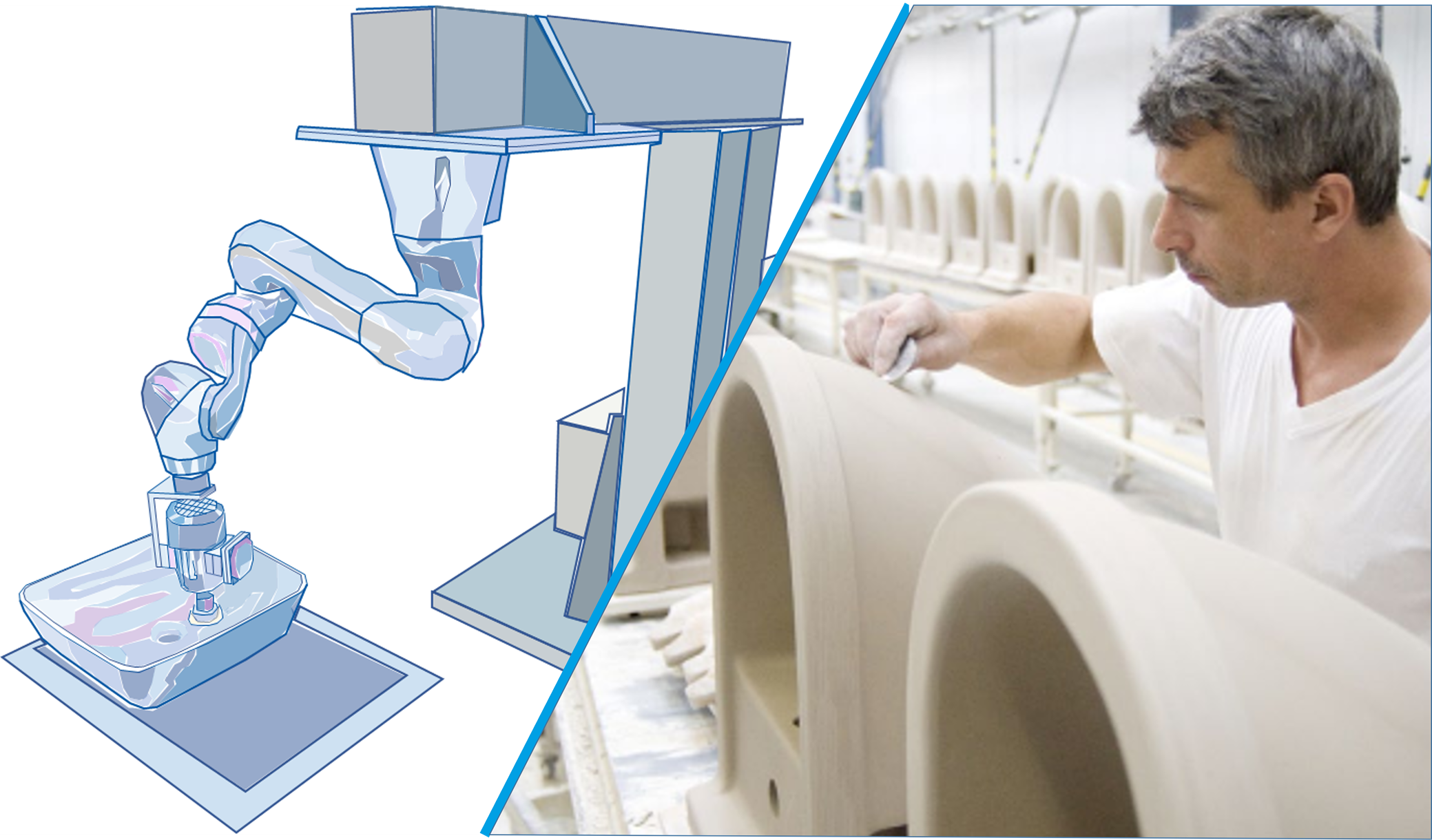
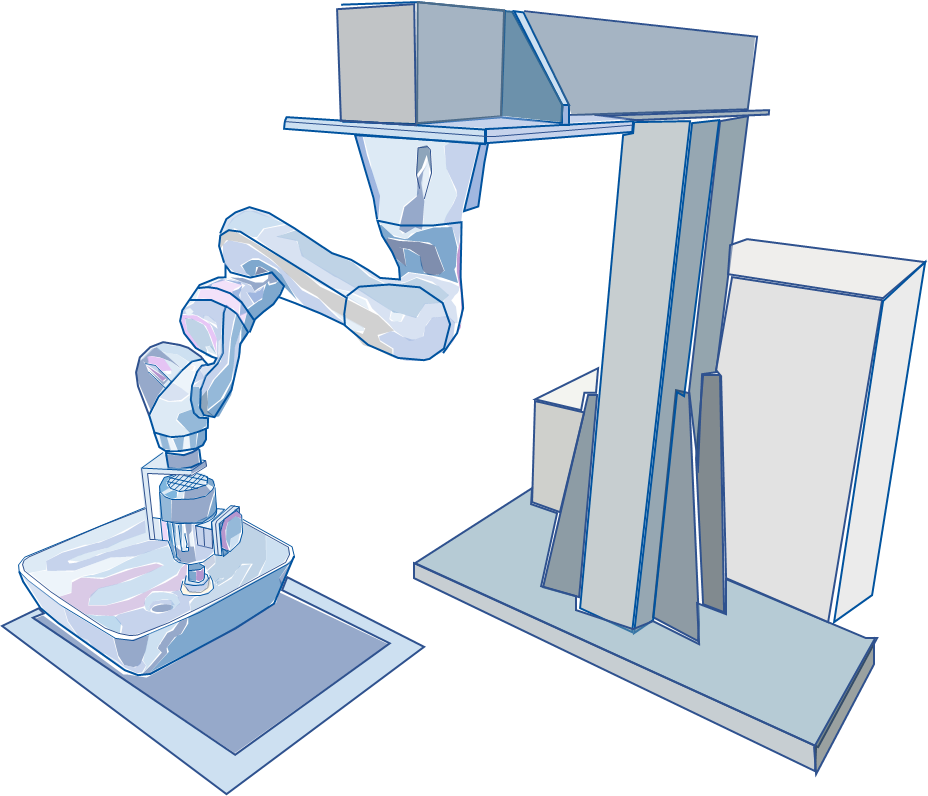
Quatre applications pilotes sont utilisées pour développer et adapter les robots en fonction des besoins de la production.
Concept de valorisation:
Durée:
01.12.2014 - 31.12.2017















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}