Projet ZTS SenRob
problématique
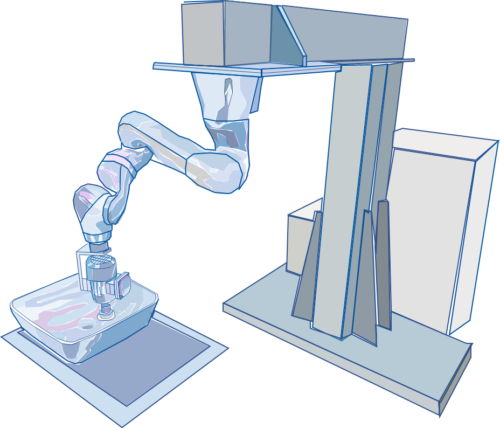
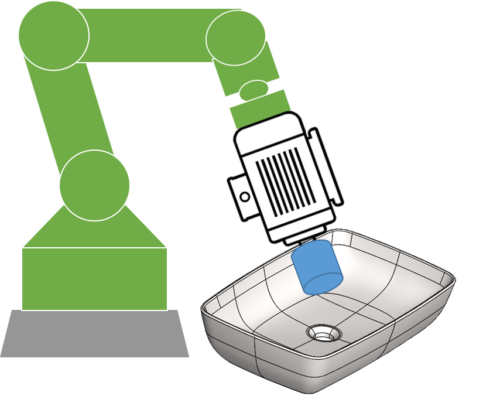
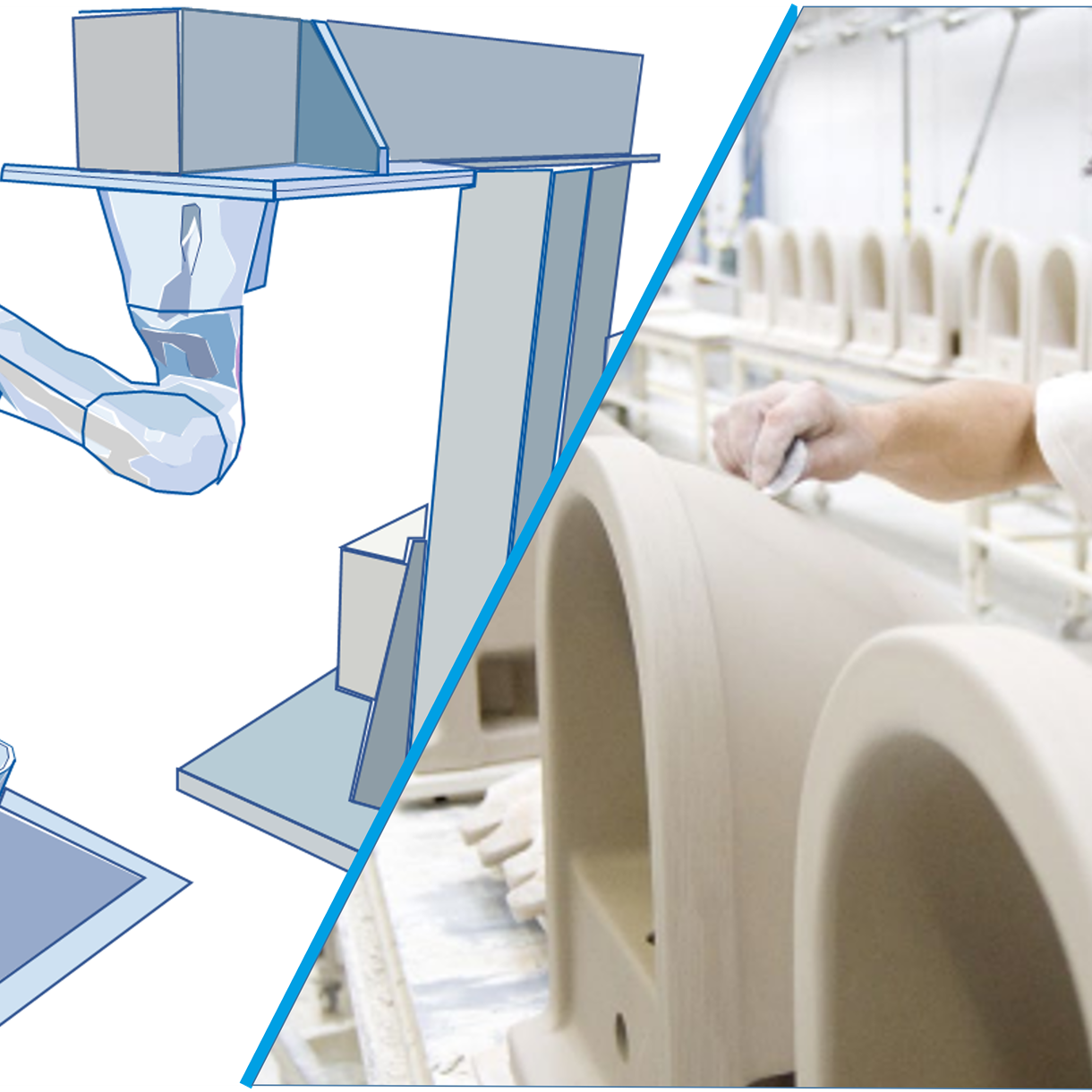
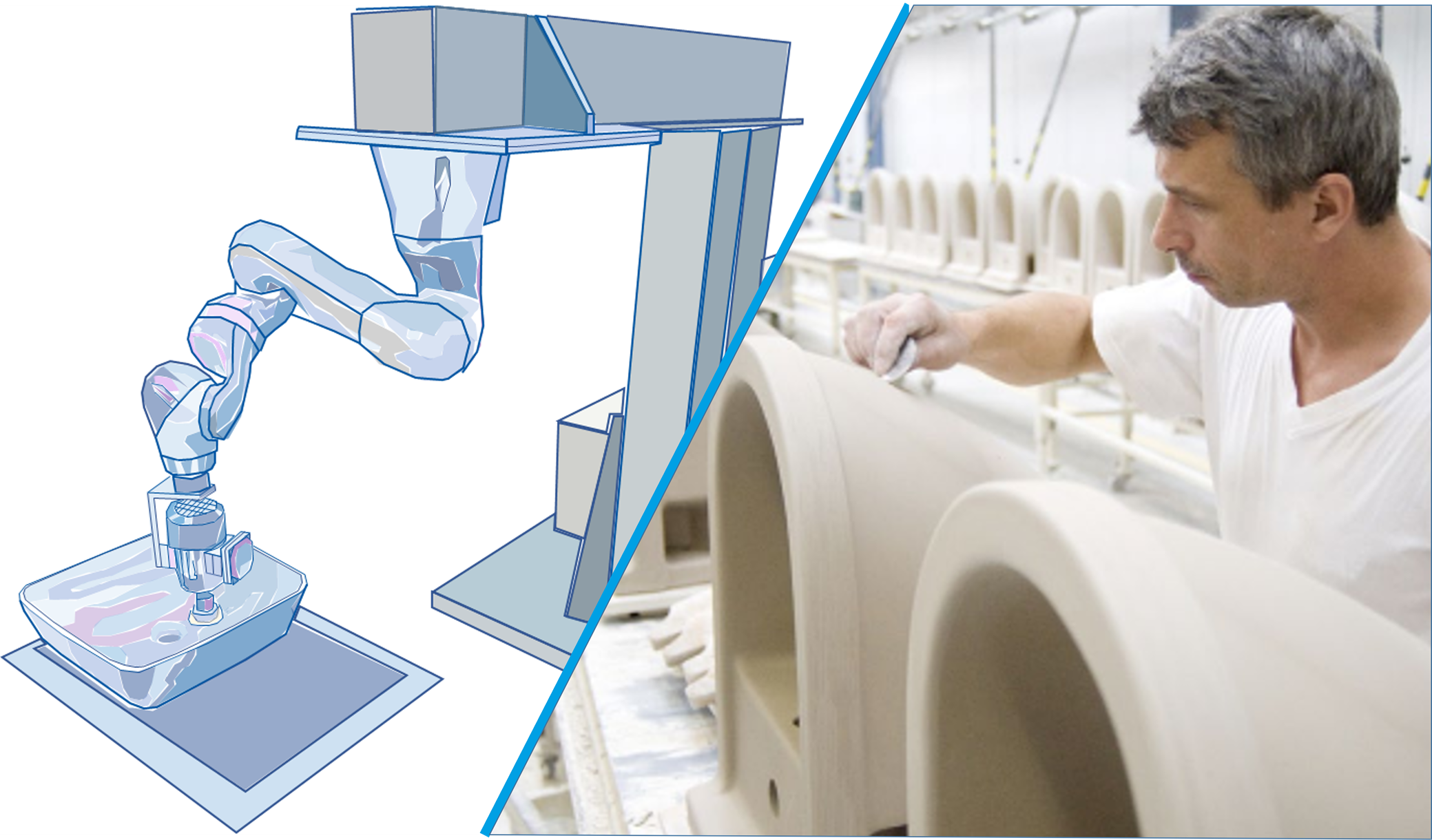
Le processus de fabrication de composants céramiques génère des surplus de matériaux liés à la fabrication ainsi que des défauts qui doivent être éliminés dans le processus de plâtre blanc en aval. Le meulage nécessite une interaction directe de l'outil avec la surface de la pièce à usiner, ce qui crée des forces et des moments de contact. Lors de l'automatisation d'un tel processus à l'aide d'un robot, un comportement souple du manipulateur de robot est nécessaire. En particulier, la stratégie de régulation choisie joue un rôle important pour pouvoir réagir de manière adéquate au contour de la pièce pendant le processus d'usinage. En outre, un outil spécial ainsi que des capteurs sélectionnés en combinaison avec un logiciel approprié sont nécessaires pour une exécution globale de la tâche de meulage.
Objectif
L’objectif de ce projet est la recherche fondamentale et le développement d’un prototype d’automatisation, appelé processus de blanchiment, avec un robot sensible. L'application robotisée est conçue pour effectuer la détection des défauts sur le blanc, ainsi que le traitement et le contrôle de la qualité du blanc. Pour ce faire, les défauts systématiques et aléatoires sont détectés par une technique de mesure et le robot ponce la surface de forme libre défectueuse du blanc avec une force bien définie. Le projet de recherche pose les bases d'une application robotisée. Il s'agit notamment des composants matériels et logiciels. Sur la base d'un développement des processus et de la technologie, le processus et les équipements nécessaires tels que les robots, les capteurs et les outils ainsi que la planification et la régulation des voies robotisées doivent être explorés et mis en œuvre de manière prototypique.
Procédure à suivre
Le projet de recherche est divisé en trois modules de travail:
AP1: Dans l'étape de travail 1, une analyse du processus de production actuel et du produit est effectuée.
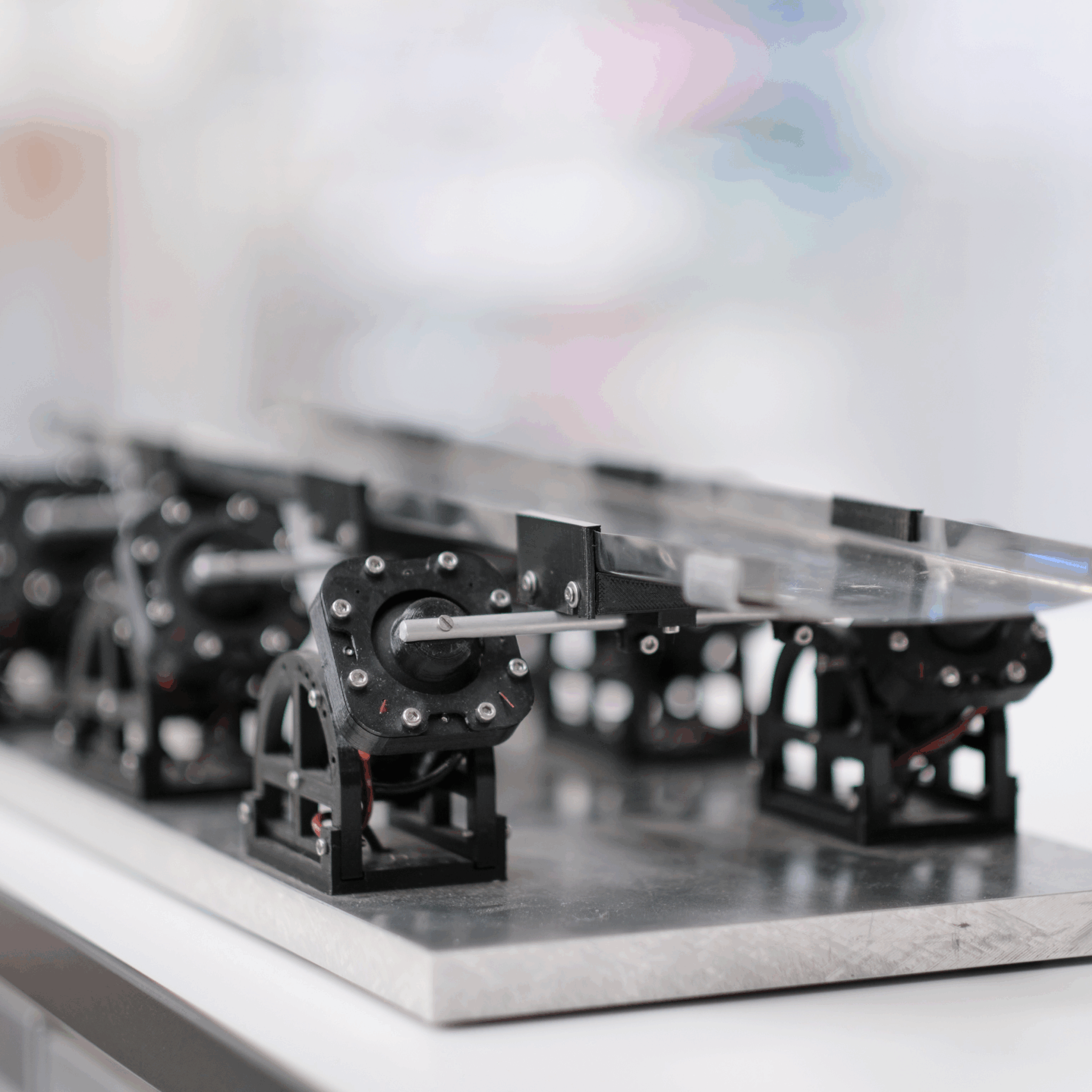
AP2: L'étape 2 comprend le développement du processus. Il s'agit notamment du concept de robot, de l'outil, du système multicapteur ainsi que du développement des composants logiciels.
AP3: L'objectif de l'étape 3 est de réaliser des séries d'essais dans l'environnement de travail réel. Ce faisant, des connaissances et des informations sur le concept actuel sont collectées et la robustesse des processus et les risques techniques sont identifiés.
AP1: Dans l'étape de travail 1, une analyse du processus de production actuel et du produit est effectuée.
AP2: L'étape 2 comprend le développement du processus. Il s'agit notamment du concept de robot, de l'outil, du système multicapteur ainsi que du développement des composants logiciels.
AP3: L'objectif de l'étape 3 est de réaliser des séries d'essais dans l'environnement de travail réel. Ce faisant, des connaissances et des informations sur le concept actuel sont collectées et la robustesse des processus et les risques techniques sont identifiés.
Résultats/état d'avancement du projet
Le projet a été lancé en mai 2021 et se poursuivra jusqu’en août 2022. Le développement d'un outil prototype a déjà permis d'identifier des connaissances pour le réglage des paramètres de meulage et de robot. En outre, une approche d'évaluation automatique des bords des composants basée sur des capteurs a été élaborée dans le contexte du contrôle de la qualité. Dans ce qui suit, il s'agit de tester ce qui a déjà été développé dans le cadre de séries expérimentales à l'aide d'un démonstrateur dans l'environnement réel.
Le projet est financé au titre du FEDER par le «ZTS Zentrale Technologieprogramm Saar»
Catégorie: Systèmes de montage









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}