ZTS Projekt SenRob
Problemstellung
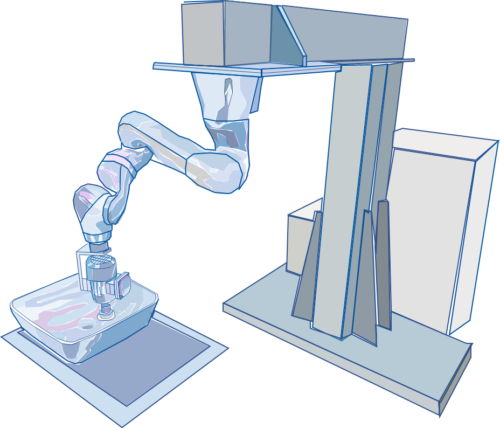
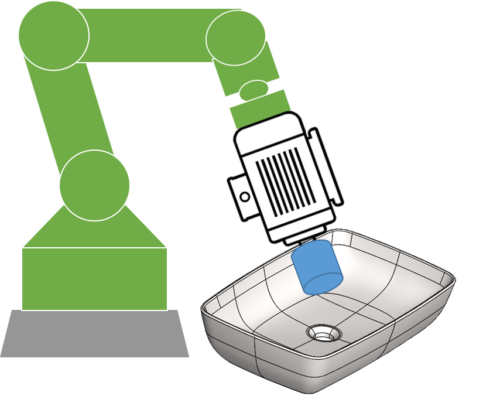
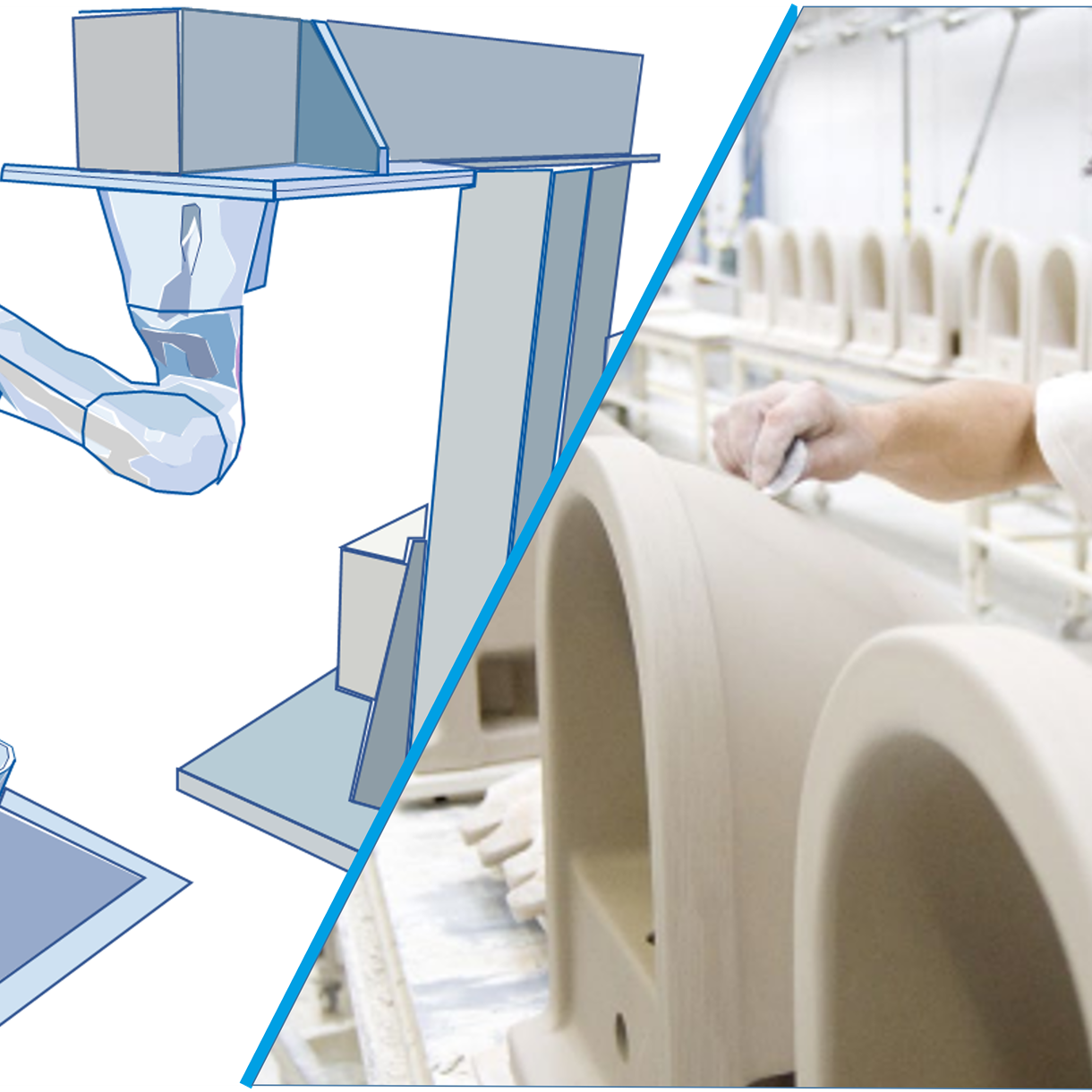
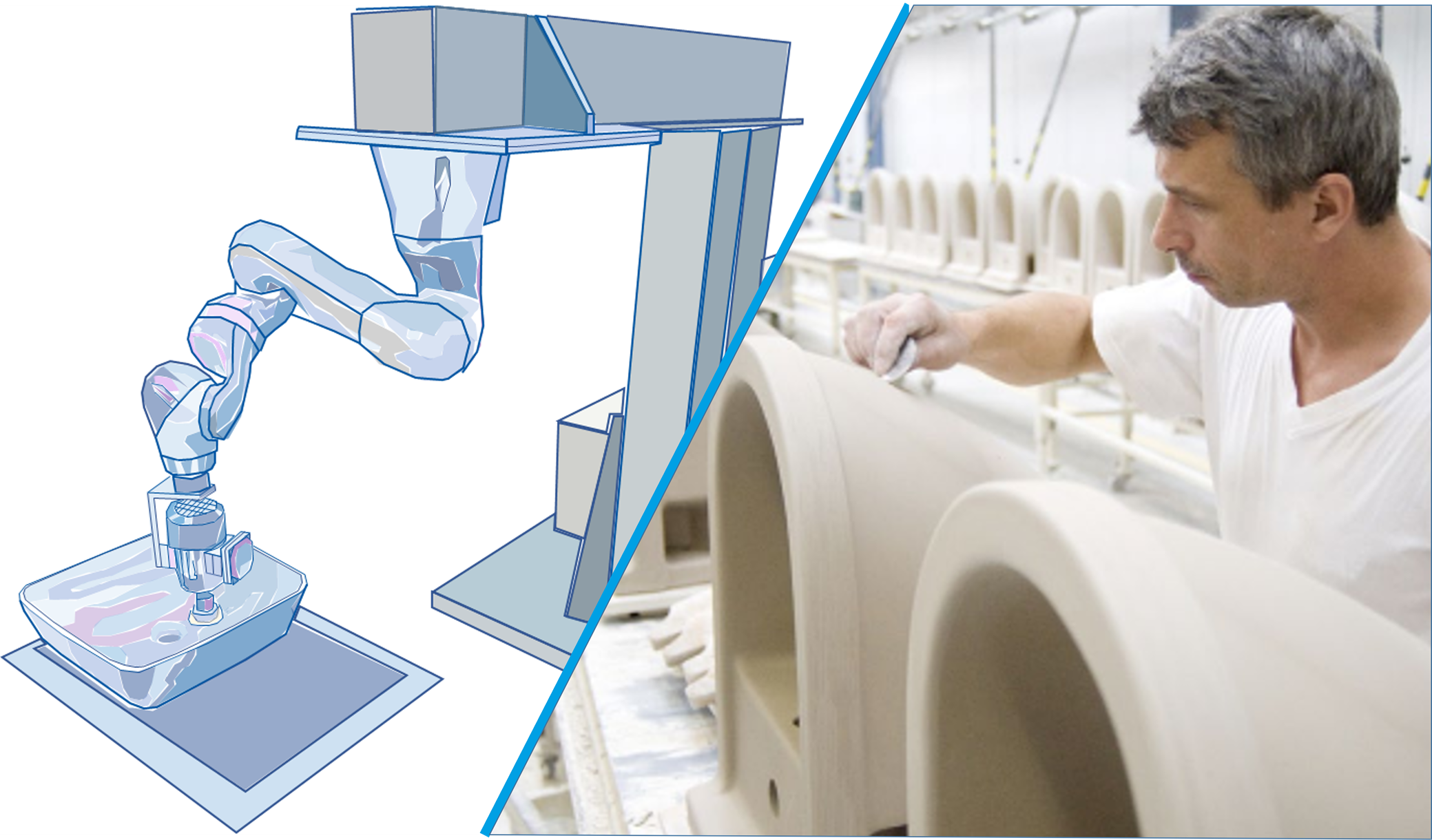
Beim Herstellungsprozess von keramischen Bauteilen entstehen fertigungsbedingte Materialüberstände sowie Fehler, die im nachgelagerten Weißputzprozess entfernt werden müssen. Das Schleifen verlangt eine direkte Interaktion des Werkzeuges mit der zu bearbeitenden Werkstückoberfläche, sodass Kontaktkräfte und -momente entstehen. Bei der Automatisierung eines solchen Prozesses mithilfe eines Roboters ist ein nachgiebiges Verhalten des Robotermanipulators notwendig. Insbesondere die gewählte Regelungsstrategie spielt eine wichtige Rolle, um während des Bearbeitungsprozesses adäquat auf die Bauteilkontur reagieren zu können. Darüber hinaus wird ein spezielles Werkzeug sowie ausgewählte Sensorik in Kombination mit passender Software für eine gesamtheitliche Ausführung der Schleifaufgabe notwendig.
Zielsetzung
Das Ziel in diesem Projekt ist die Grundlagenforschung und -entwicklung eines Prototyps für die Automatisierung, des sog. Weißputzprozesses, mit einem sensitiven Roboter. Die Roboteranwendung soll die Erfassung von Fehlern am Weißling sowie die Bearbeitung und die Qualitätskontrolle des Weißlings durchführen. Dazu werden die systematischen und zufälligen Fehler durch eine Messtechnik detektiert und der Roboter schleift mit einer genau definierten Kraft die fehlerhafte Freiform-Oberfläche des Weißlings. Im Forschungsprojekt werden die Grundlagen für die roboterbasierte Anwendung geschaffen. Dazu zählen die Hardware- und Softwarekomponenten. Anhand einer Prozess- und Technologieentwicklung sollen der Prozess und die erforderlichen Betriebsmittel wie Roboter, Sensoren und Werkzeuge sowie die Roboterbahnplanung und -regelung erforscht und prototypisch umgesetzt werden.
Vorgehen
Das Forschungsprojekt ist in drei Arbeitspakete unterteilt:
AP1: In Arbeitsschritt 1 wird eine Analyse des aktuellen Produktionsprozesses und des Produktes durchgeführt.
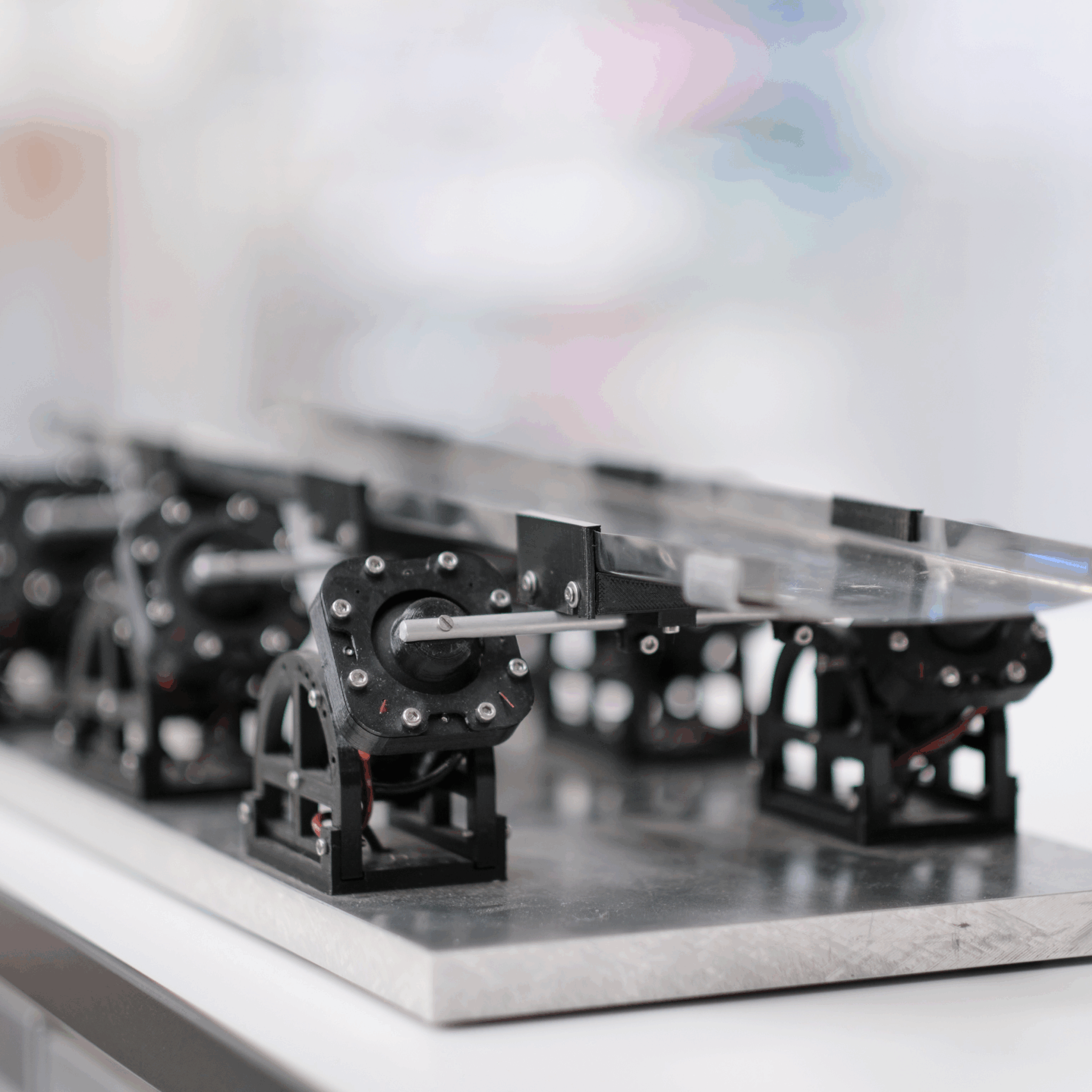
AP2: Arbeitsschritt 2 beinhaltet die Prozessentwicklung. Dazu zählen im Detail das Roboterkonzept, das Werkzeug, das Multisensorsystem sowie die Entwicklung der Softwarekomponenten.
AP3: Ziel des Arbeitsschrittes 3 ist die Durchführung von Versuchsreihen in der realen Arbeitsumgebung. Dabei werden Erkenntnisse und Informationen über das aktuelle Konzept gesammelt sowie die Prozessrobustheit und technische Risiken identifiziert.
AP1: In Arbeitsschritt 1 wird eine Analyse des aktuellen Produktionsprozesses und des Produktes durchgeführt.
AP2: Arbeitsschritt 2 beinhaltet die Prozessentwicklung. Dazu zählen im Detail das Roboterkonzept, das Werkzeug, das Multisensorsystem sowie die Entwicklung der Softwarekomponenten.
AP3: Ziel des Arbeitsschrittes 3 ist die Durchführung von Versuchsreihen in der realen Arbeitsumgebung. Dabei werden Erkenntnisse und Informationen über das aktuelle Konzept gesammelt sowie die Prozessrobustheit und technische Risiken identifiziert.
Ergebnisse / Projektstand
Das Projekt wurde im Mai 2021 gestartet und läuft bis August 2022. Durch die Entwicklung eines Prototypenwerkzeuges konnten bereits Erkenntnisse für die Einstellung der Schleif- und Roboterparameter identifiziert werden. Außerdem wurde ein Ansatz zur automatischen sensorbasierten Beurteilung von Bauteilkanten im Kontext der Qualitätskontrolle erarbeitet. Im Folgenden gilt es, das im Rahmen von Versuchsreihen bereits Entwickelte mit Hilfe eines Demonstrators in der realen Umgebung zu testen.
Das Projekt ist gefördert im Rahmen von EFRE durch das „ZTS Zentrale Technologieprogramm Saar“
Category: Montagesysteme










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}